- Blog
- 如何利用PID调优?
如何利用PID调优?
Alicat流量和压力控制器使用闭环控制算法来实现其高程度的控制稳定性。这些算法是一个数学关系,指示阀门对流量或压力条件的响应。它评估设定值和工艺值之间的差异——无论是质量流量、体积流量还是压力——作为一个错误。误差的程度决定了什么样的输入要发送到阀门,在极快的时间达到正确的值。最小化错误所花费的时间(因此控制器的控制响应)取决于所使用的循环类型(PD或PD2I)以及所使用的P、D和I值。
当您订购您的控制器,我们设置比例和衍生的价值,试图复制的应用程序参数(过程条件),以我们的能力,在我们发货给你。这种定制您的系统是一个原因,我们的控制器是快速。
不用担心
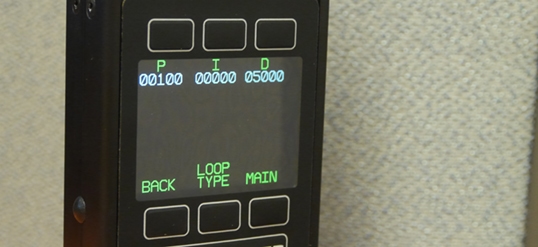
如果工艺条件发生变化,阀门的响应可能会发生剧烈变化,这取决于您对阀门所处的条件的偏离程度。如果条件发生变化,您不必担心控制器的不稳定响应,因为可以在现场进行PID调优,从而更好地控制新的工艺条件。您可以通过显示面板按钮或使用数字或模拟通信的电子命令更改PID术语。
当您为所有三个参数选择正确的值时(对于单个阀门控制器,选择两个),您将从控制器获得更佳性能。“P”项打开阀门达到设定值,“D”项施加阻尼影响消除超调,“I”项帮助系统稳定到设定值。
以前的一个博客(通过PID调整实现响应性和稳定性的阀门控制)描述了P、D、I术语。
简要:
- 比例(P): P项对阀门施加功率,因为它试图减少设定值与工艺值位置之间的误差,以达到设定值
- 导数(D):把它想成一个试图降低变化率的阻尼项。D项越大,阻尼对阀驱动的影响越大
- 积分(I):积分在微积分中是曲线下的面积,它决定了阀门的输出是所有误差之和的函数。本学期将考虑先前的阅读资料,以减少错误并将过程值修正到设定值。
围绕设定点振荡
如果你的控制器在设定值附近显示出振荡的迹象,或者控制响应不稳定,那就是P项太大的迹象。P值越大,振荡幅度越大。为了消除振荡(使控制器达到设定值),需要减小P项。
假设你有一个10slpm的控制器设定为10slpm的氢气。控制器在8到12slpm之间振荡。与空气相比,氢是一种低粘度、非常轻的气体。在这种情况下,与空气调谐的阀门应该重新调谐。因此,从出厂P值(例如,它可能是1000)开始,尝试10%的递减,并一直向下,直到您看到控制器以最快的速度稳定到设定值。一般来说,我们只在你改变了P项之后才接触D项,所以如果你仍然有小的振荡,你可以增加5-10%的D值。这将帮助控制器变得更加稳定。
延迟设定点
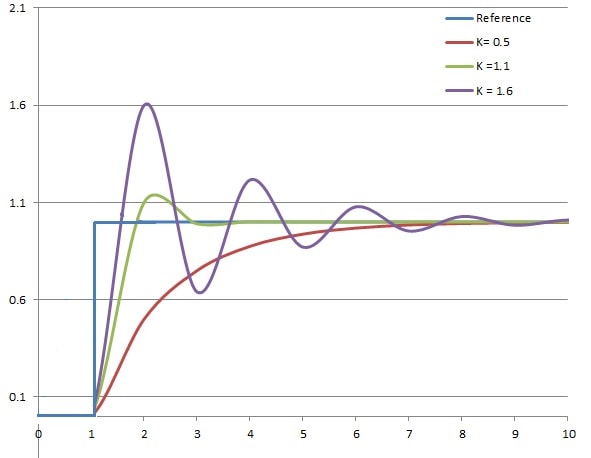
过量的P(紫色)产生振荡。低P(红色)慢慢上升到设定值。最优(绿色)很快就定下来了。
第二种情况是,当您的控制器花了太长时间来达到设定值,或从未达到设定值,但解决了流量或压力低于设定值。这意味着要么使用太小的P值,要么使用太大的阻尼影响。以汽车为例,假设你想要达到70英里每小时。但是当你开始加速时,有人会踩刹车,这会降低汽车的加速度。如果减速大于加速,汽车可能永远达不到70英里/小时,当加速=减速,或相反的力相等时,汽车可能稳定在60英里/小时的速度。
在这种情况下,尝试以10-15%的增量增加P值,直到看到控制器接近您的设定值。下一步是降低D值,以帮助控制器更快地到达设定值。如果你开始看到一些振荡,这意味着D值被设置得太低了。
控制回路调整是为了更好地了解控制器如何响应P和D项的变化。气体粘度、入口压力、背压对阀门的反应有很大的影响。调整阀门是一门艺术,而不是科学,你越熟悉你的控制器,你就越能更好地调整它。
艾里卡特Alicat提供先进的质量流量计、质量流量控制器、压力控制器、压力传感器解决方案。
如需查看或下载产品说明书,请点击Alicat文件中心。