PID 调节(PD/PDF 和 PD 2 I)教程
闭环控制算法用于调整艾里卡特流量或压力控制器内的阀门响应能力。修改这些算法中的变量允许用户控制控制器达到设定点的速度以及控制稳定性。
在本文中,我们将解释阀门调节背后的一些理论,并提供有关调节您自己的艾里卡特设备的技巧。
何时调整控制器
在发货之前,每个控制器都经过调整,以便在指定的过程条件下获得合格的阀门性能。例如,如果控制器被命令以 25 SCCM 流动空气,那么它将根据这一点进行调整。这意味着,如果您按照您的配置使用控制器,则阀门调节和控制稳定性应该是稳定的。
但是,如果工艺条件发生变化,例如,如果您决定流动氢气而不是空气,或者如果您修改入口/出口压力,则可能需要重新调整设备。
使用 PD/PDF 和 PD 2 I 控制算法进行阀门调节
有两种控制算法用于调整 Alicat 控制器:
- PD/PDF 调谐通常用于单阀控制器
- PD 2 I 调谐通常用于双阀控制器(MCD 和 PCD)
注意:您可以通过转到 Alicat 控制器前面板上的 MENU > CONTROL > CONTROL LOOP > LOOP TYPE 查看所选的控制回路。
PID 控制算法由三个项组成,每个项都发挥着各自的作用,以尽量大限度地减少设定值和测量的过程变量之间的误差。它们的定义如下:
- 比例 (P):比例项可减少设定值和读数之间的误差。
- 导数 (D):导数变量抑制阀门位置的变化率。
- 积分(I):积分变量考虑先前误差的总和。
注意:您可以通过转到 Alicat 控制器前面板上的 MENU > CONTROL > CONTROL LOOP 查看 P、D 和 I 变量的当前设置。
PD/PDF 算法
PD/PDF 算法提供了简化的用户界面。它只需要用户使用两个变量:P 和 D。这大大降低了用户的难度。
有几个明显的问题表明设备需要进行阀门调整:
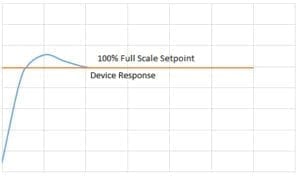
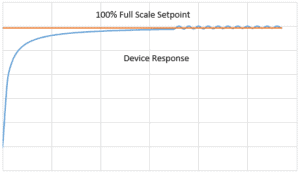
- 您注意到设定点附近振荡或控制响应不稳定。
- 您的控制器需要很长时间才能达到设定点,或者从未达到设定点,但流量或压力稳定在低于设定点值。
以下是有关调整设备以解决这些问题的说明。
分步说明
- 确保您的控制器是串行连接的。
- 这些说明假定设备 ID 为 A。如果您的控制器的设备 ID 不是 A,请替换为设备 ID 的正确字母。如果您的控制器处于流模式,请勿在下面的说明中键入前导“a”。
- 在本教程中,我们将使用 [Unit ID] S # 命令给出控制器设定值。此外,我们将假设一个 2 SLPM 满量程质量流量控制器 (MC-2SLPM-D)。因此,我们的满量程设定点命令将为AS2。同样,1 SLPM 或 0.4 SLPM 的命令将分别为AS1和AS0.4。将设定点值替换为您的设置所需的值。
- 将 PID 回路类型设置为 PD/PDF。
- 有多种方法可以执行此操作。最简单的是从 Alicat 设备的前面显示屏按钮调节。
- 从设备的前面板转至:MENU > CONTROL > ADV CONTROL > LOOP SETUP > LOOP TYPE。这是Alicat最新固件的菜单图。如果您发现您的菜单有所不同,请查阅您的手册或咨询我们的应用工程师。
- 选择PD/PDF 控制并按SET。
- 要连续执行此操作,请使用循环控制算法命令。要查询正在使用哪种算法,请使用ALCA。对于 PD/PDF 将返回值 1,对于 PD²I 将返回值 2 。
- 要将算法设置为 PD/PDF,请使用命令ALCA 1。设备将响应A 1。
- 要将算法设置为 PD²I,请使用命令ALCA 2。设备将响应A 2。
- 有多种方法可以执行此操作。最简单的是从 Alicat 设备的前面显示屏按钮调节。
- 设置所有 PID 变量。
- 记录控制器现有的 PID 设置。
- 读取当前 P 值:输入ar21。
- 读取当前 D 值:输入ar22。
- 将寄存器 21 中的 P 变量设置为 100:输入aw21=100。
- 将寄存器 22 中的 D 变量设置为 5000:输入aw22=5000。
- 记录控制器现有的 PID 设置。
- 确定合适P 值。
- 确保您的控制器连接到具有适当压力和流量的气源。从 0 设定值开始:输入 AS0。
- 命令 5%、25%、50% 和 100% 设定点(AS0.1、AS0.5、AS1、AS2),并观察流量读数。
- 如果没有超调,则将寄存器 21 中的 P 变量加 100:输入 AW21= [旧值+100]。从步骤 a 重新开始。一旦观察到少量超调,请继续执行步骤 d。
- 如果存在无阻尼振荡,则从寄存器 21 中的 P 变量中减去 10:输入AW21= [旧值-10]。重复此操作,直到设定点更改后振荡消失。如果 5 次迭代后没有改善,请跳到第 5 部分并开始增加 D 变量。
- 确定合适D值。
- 确保您的控制器仍按步骤 4 所示连接并从 0 设置点开始:键入 AS0。
- 命令 5%、25%、50% 和 100% 设定值(AS0.1 、 AS0.5、 AS1、 AS2),并观察流量读数。
- 如果遇到过冲和振荡,请一次增加 D 1000:输入 AW22= [旧值+1000]。从步骤 a 重新开始。
- 如果流量读数与您的设定值相符并且读数稳定,请继续执行下一步。
- 验证最终的调整。
- 为了正确平衡响应速度和稳定性,可能需要多次重复上述步骤 4 和 5。
- 如果无法通过调谐来抑制振荡,则可能存在来自系统其他部分的机械干扰。
这可以通过 FlowVision SC 通过在仪表板上的相应框中输入新值来完成。
- 将 PID 回路类型设置为 PD/PDF。
- 从设备的前面板,转至:菜单 > 控制 > 控制循环 > 循环类型。这是Alicat最新固件的菜单图。如果您发现您的菜单有所不同,请查阅您的手册或咨询我们的应用工程师。
- 选择PD/PDF 控制并按SET。
- 将 PID 变量设置为 P=100 和 D=5000。
- 转至:菜单 > 控制 > 控制循环。在对 P 和 D 值进行任何更改之前,请务必记录控制器的现有设置。
- 选择P Gain,将 P 增益更改为 100,然后按 SET
- 选择D Gain,将 D 增益更改为 5000,然后按 SET
- 确定合适 P 值。
- 确保您的控制器连接到具有适当压力和流量的气源。从 0 设定点开始。
- 命令 5%、25%、50% 和 100% 设定点,并观察流量读数。
- 如果没有超调,则将 P 变量加 100。从步骤 a 重新开始。一旦观察到少量超调,请继续执行步骤 d。
- 如果存在无阻尼振荡,则从 P 变量中减去 10。重复此操作,直到设定点更改后振荡消失。如果 5 次迭代后没有改善,请跳到第 4 部分并开始增加 D 变量。
- 确定适当D值。
- 确保您的控制器仍按步骤 4 所示连接并从 0 设置点开始。
- 命令 5%、25%、50% 和 100% 设定点,并观察流量读数。
- 如果遇到过冲和振荡,请一次增加 D 1000。从步骤 a 重新开始。
- 如果流量读数与您的设定值相符并且读数稳定,请继续执行下一步。
- 验证最终的调整。
- 为了适当平衡响应速度和稳定性,可能需要多次重复上述步骤 3 和 4。
- 如果无法通过调谐来抑制振荡,则可能存在来自系统其他部分的机械干扰。
PD 2 I 算法
PD 2 I 算法由 Alicat Scientific 开发,其明确目的是在压力控制应用中获得尽可能高的性能。它还适用于许多流量控制应用。由于它利用专有的预测功能,因此该算法的行为与标准 PID 例程不同。幸运的是,如果您遵循一些简单的指导原则,PD 2 I 调整会很简单:
分步说明
- 确保您的控制器是串行连接的。
- 这些说明假定设备 ID 为 A。如果您的控制器的设备 ID 不是 A,请替换为设备 ID 的正确字母。如果您的控制器处于流模式,请勿在下面的说明中键入前导“a”。
- 在本教程中,我们将使用 [Unit ID] S # 命令给出控制器设定值。此外,我们将假设一个 2 SLPM 满量程质量流量控制器 (MC-2SLPM-D)。因此,我们的满量程设定点命令将为AS2。同样,1 SLPM 或 0.4 SLPM 的命令将分别为AS1和AS0.4。将设定点值替换为您的设置所需的值。
- 将 PID 回路类型设置为 PD 2 I。
- 有多种方法可以执行此操作。最简单的是从 Alicat 设备的前面板。
- 从设备的前面板转至:MENU > CONTROL > ADV CONTROL > LOOP SETUP > LOOP TYPE。这是Alicat最新固件的菜单图。如果您发现您的菜单有所不同,请查阅您的手册或咨询我们的应用工程师。
- 选择PD 2 I 控制并按SET。
- 要连续执行此操作,请使用循环控制算法命令。要查询正在使用哪种算法,请使用ALCA。对于 PD/PDF 将返回值 1,对于 PD²I 将返回值 2 。
- 要将算法设置为 PD/PDF,请使用命令ALCA 1。设备将响应A 1。
- 要将算法设置为 PD²I,请使用命令ALCA 2。设备将响应A 2。
- 有多种方法可以执行此操作。最简单的是从 Alicat 设备的前面板。
- 将所有 PID 变量设置为 P=200、D=10、I=100。
- 记录控制器现有的 PID 设置。
- 读取当前 P 值:输入ar21。
- 读取当前 D 值:输入ar22。
- 读取当前 I 值:输入ar23。
- 将寄存器 21 中的 P 变量设置为 200:输入aw21=200。
- 将寄存器 22 中的 D 变量设置为 10:输入aw22=10。
- 将寄存器 23 中的 I 变量设置为 100:输入aw23=100。
- 记录控制器现有的 PID 设置。
- 确定适当 P 值。
- 确保您的控制器连接到具有适当压力和流量的气源。从 0 设定值开始:输入 AS0。
- 命令 25%、75% 和 100% 设定值(AS0.5 、AS1.5、AS2),并观察流量读数。
- 如果观察到任何振荡,请将 P 增加 100:输入AW21= [旧值+100] 。从步骤 a 重新开始。如果您发现增加 P 会增加振荡,请跳过此步骤并继续执行步骤 d。
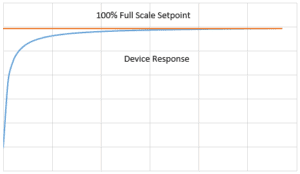
- 如果存在无阻尼振荡,则从寄存器 21 中的 P 变量中减去 10:输入AW21 =[旧值-10]。重复此步骤,直到流量接近设定点且没有超调或振荡。不用担心收敛速度。此时,调整可能如下所示。
- 确定适当 I 值。
- 确保您的控制器仍按步骤 4 所示连接并从 0 设置点开始:键入 AS0。
- 命令 25%、75% 和 100% 设定值(AS0.5 、AS1.5、AS2),并观察流量读数。
- 要提高收敛速度,请将 50 添加到寄存器 23 中的 I 变量:输入 AW23= [旧值+50]。从步骤 a 重新开始。
- 如果增加 I 后观察到过冲和振荡,请将 I 返回到之前的值。
- 如果流量读数与您的设定值相符并且以您满意的速度收敛,请继续执行下一步。
- 确定适当D值。
- 对于几乎所有调整场景,适当 D 值为 10,不需要任何更改。如果您当前的调整已足够,请继续执行步骤 7。
- 确保您的控制器仍按步骤 4 所示连接并从 0 设置点开始:键入 AS0。
- 命令 25%、75% 和 100% 设定值(AS0.5 、AS1.5、AS2),并观察流量读数。
- 如果观察到围绕设定点的振荡,请将 10 添加到寄存器 22 中的 D 变量:输入 AW22= [旧值+10]。从步骤 b 重新开始。如果流量读数稳定,请继续执行步骤 7。D 寄存器中的值不要超过 50。如果您看起来需要这样做,请返回到步骤 4,然后重新开始。
- 验证最终的调整。
- 为了适当平衡响应速度和稳定性,可能需要重复上述步骤 4、5 和 6 多次。
- 如果无法通过调谐来抑制振荡,则可能存在来自系统其他部分的机械干扰。
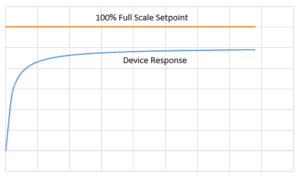
- 你的最终调音应该看起来像这样。
这可以通过 FlowVision SC 通过在仪表板上的相应框中输入新值来完成。
- 将 PID 回路类型设置为 PD 2 I。
- 从设备的前面板,转至:菜单 > 控制 > 控制循环 > 循环类型。这是Alicat最新固件的菜单图。如果您发现您的菜单有所不同,请查阅您的手册或咨询我们的应用工程师。
- 选择PD 2 I 控制并按SET。
- 将 PID 变量设置为 P=200、D=10、I=100。
- 转至:菜单 > 控制 > 控制循环。在对 P 和 D 值进行任何更改之前,请务必记录控制器的现有设置。
- 选择P 增益,将 P 增益更改为 200,然后按 SET。
- 以类似的方式,将 D 增益更改为 10,将 I 增益更改为 100。
- 确定适当 P 值。
- 确保您的控制器连接到具有适当压力和流量的气源。从 0 设定点开始。
- 命令 25%、75% 和 100% 设定点并观察流量读数。
- 如果观察到任何振荡,请将 P 增加 100 。从步骤 a 重新开始。如果您发现增加 P 会增加振荡,请跳过此步骤并继续执行步骤 d。
- 如果存在无阻尼振荡,则从 P 中减去 10。重复此步骤,直到流量接近设定点且没有超调或振荡。不用担心收敛速度。此时,调整可能如下所示。
- 确定适当 I 值。
- 确保您的设备仍按步骤 3 所示保持连接,并从 0 设置点开始。
- 命令 25%、75% 和 100% 设定点,并观察流量读数。
- 要提高收敛速度,请将 I 变量添加 50。从步骤 a 重新开始。
- 如果增加 I 后观察到过冲和振荡,请将 I 返回到之前的值。
- 如果流量读数与您的设定值相符并且以您满意的速度收敛,请继续执行下一步。
- 确定适当D值。
- 对于几乎所有调整场景,适当 D 值为 10,不需要任何更改。如果您当前的调整已足够,请继续执行步骤 6。
- 确保您的控制器仍按步骤 4 所示连接并从 0 设置点开始。
- 命令 25%、75% 和 100% 设定点,并观察流量读数。
- 如果观察到围绕设定点的振荡,请将 D 变量加 10。从步骤 b 重新开始。如果流量读数稳定,请继续执行步骤 6。D 寄存器中的值不要超过 50。如果您看起来需要这样做,请返回步骤 3,然后重新开始。
- 验证最终的调整。
- 为了适当平衡响应速度和稳定性,可能需要多次重复上述步骤 3、4 和 5。
- 如果无法通过调谐来抑制振荡,则可能存在来自系统其他部分的机械干扰。
- 你的最终曲线应该看起来像这样。